12日から福島第1原発1号機の原子炉格納容器内部の水中ロボットによる本格調査が始まりました。河北新報が取り上げました。
ロボットには、基本的に半導体部品は強烈な放射能でダメージを受けて使えないため、すべてそれ以前の技術を用いているということです。
~~~~~~~~~~~~~~~~~~
水中ロボ、廃炉の内部調査に投入 福島第1原発1号機で東電
河北新報 2022年01月10日
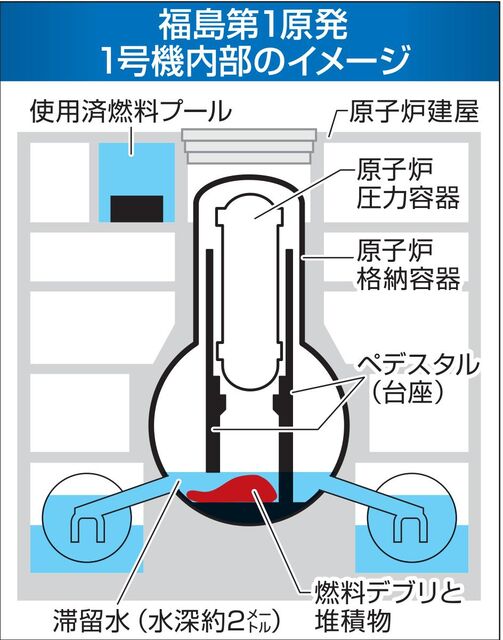
東京電力は12日、福島第1原発1号機の廃炉に向けた準備作業のため、原子炉格納容器内部の本格調査に着手する。1号機は事故時の冷却作業が遅れ、全ての核燃料が溶け落ちて格納容器の底に堆積しているとされる。同じく炉心溶融を起こした2、3号機より損傷規模が大きく、詳しい内部の状況は不明のままだった。全容の把握に向け、新開発した水中ロボットを使った一大プロジェクトが始まる。
1号機は最初に炉心溶融を起こし、原子炉建屋は水素爆発した。冷却機能を失い2800度以上に達した核燃料は溶け落ちて圧力容器の底が抜け、「燃料デブリ」が汚染水に漬かった状態で格納容器の底部で固まっている。
2017年のロボット調査では、燃料デブリが圧力容器を支える台座(ペデスタル)の外にまで広がり、その上を厚さ1メートル程度の堆積物が覆っていることが判明。当時は全てをカメラで捉えることはできず、堆積物の分布の把握もできなかった。
今回はデブリや設備の損傷状況をカメラで確認するほか、超音波を使った周辺の3Dマッピング(立体映像投影)化、堆積物のサンプル採取などを半年間かけて行う。将来のデブリ取り出し作業に必須となる情報だ。
ロボット開発は日立GEニュークリア・エナジーと国際廃炉研究開発機構(IRID)が担った。日立出身でIRID研究管理部の菅原聡技師は「放射線の強い過酷な環境下でロボットを動かすには、多くの制約や技術的なハードルがある」と開発の苦労を語る。
精密機械は放射線に弱く、特に半導体は性能が高まるほど電気信号にノイズが生じて制御不能になる。例えばスマートフォンに実装されているカメラやセンサーの先端技術を採用できれば便利だが、高線量下では使い物にならない。このため「仕組みが単純な古い技術をどう組み合わせるかが開発の肝だった」と言う。
17年から2年間、数十人の技術者が最適解を探り、役割に応じた6種類の水中ロボットが完成した。いずれも長いケーブルを介して外から動きを制御する仕組み。先祖返りの技術を集めた「ローテク」の産物だ。
開発を指揮した日立原子力生産本部の岡田聡主管技師は歯がゆさを感じている。「『ハイテクに勝るローテク』をポリシーにしてきたが、そこに技術の飛躍はない。本来は既成概念を超えた発想が必要だ」と話す。
新開発の水中ロボットの無駄のないフォルムと白色を基調としたデザインは「引き算の美学」(岡田技師)。機能と性能を突き詰めた先の工学的な美しさを常に目指しているという。
多少なりともロボットの「見た目」を意識するのは、将来の研究開発を担う若い世代に関心を持ってもらいたいからでもある。岡田技師は「廃炉の困難に挑む技術者の意気込みが伝わればいい」。思いを込めて作り上げたロボットの活躍に期待を込める。